XPS (experimental propulsion system)





XPS is a
chassis I invented to climb over things. It's based off of a pair of
treads and includes 4 wheels as well.
It uses all 3 NXT motors. 2 motors power the treads and the other powers
the forward pair of wheels to assist in climbing. The rear pair of
wheels is unpowered as it is strictly for support.
If you want to see XPS in action skip to the video at the bottom.
Tread Base





This base is what moves the bot around during normal driving and does most of the work in climbing.
Picture 1 shows the tread base
Pictures 2-5 show close ups of half of the tread base.
If you want to duplicate this project, carefully construct one half of the base and then make the other exactly opposite of it.
The next section tells how to connect the two halves.
Tread Base and NXT construction



Picture 1 shows the connection assembly for the drive base.
Picture 2 shows it disassembled (so you can see the pegs).
Picture 3 shows the connection assemblies for the NXT in their proper position.
Picture 4 shows on of the NXT connection assemblies by itself.
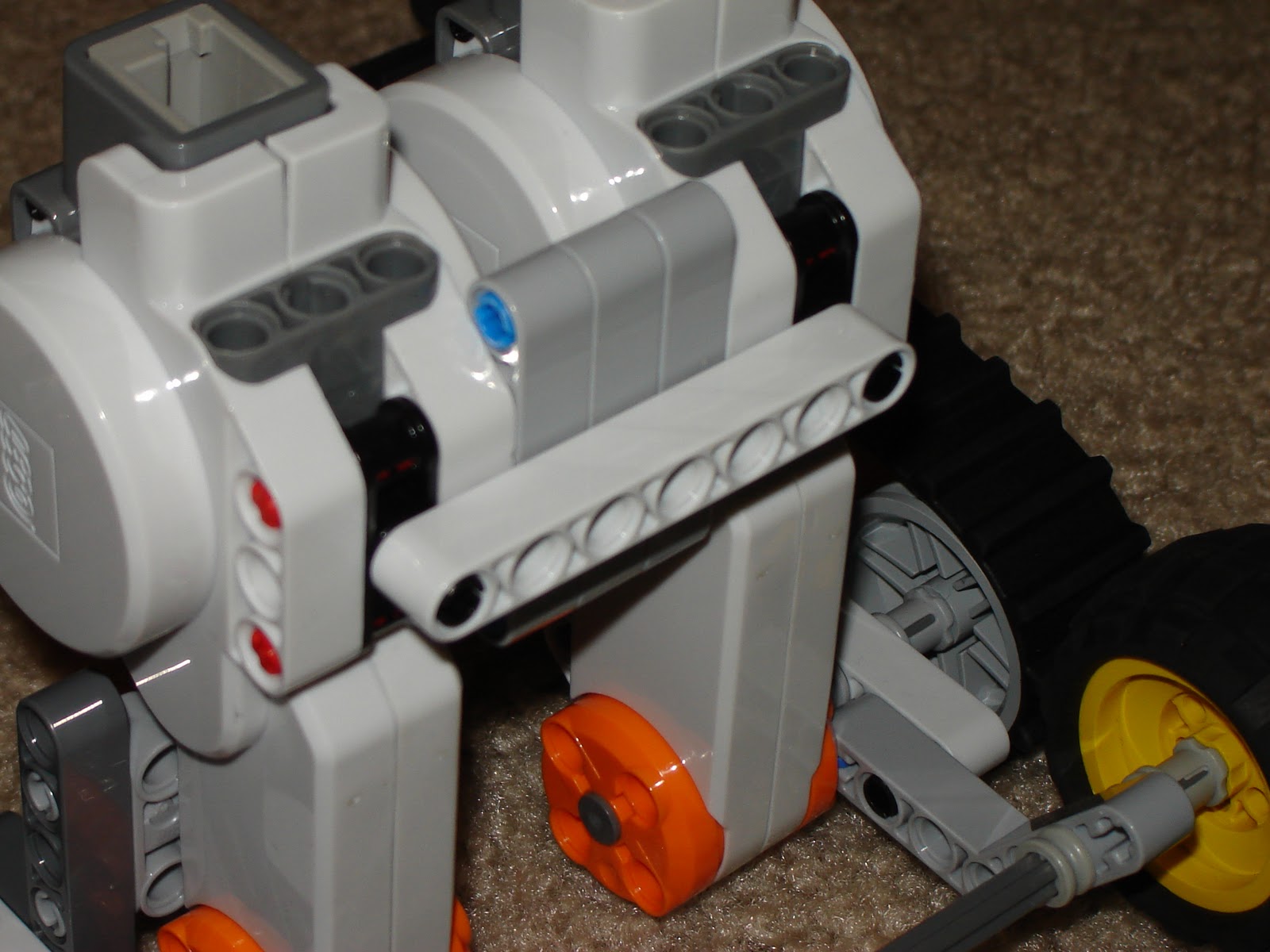
Front Wheel Assembly construction





Pictures 1 and 2 show the two steps to making the half attached to the NXT.
Pictures 3 through 5 are steps to making the motor half.
Once you have made these two, it should be simple to connect them.
Movie and Program
Continuations
I would be happy to see someone continue on this project by putting
stuff on the chassis. They would have to use pf motors of course, but I
don't thing it'd be that hard.
I recommend that they add weight near the front and as low as possible,
because the robot has a tendency to topple on sharp inclines. It may be
necessary to build things on top of the NXT brick, just make sure you
build around the buttons and screen and it should work.
If you continue on XPS, please post a comment so I will know to check
out your project!
No comments:
Post a Comment